Appearance
流星探测原理(2)
上一篇我们讲了流星的探测手段和光学流星观测的难点和对策,这一篇来讨论一下流星视频多站观测的主要流程。
简而言之,我们对流星的视频观测,就是从用摄像机拍摄天空,到计算出流星轨迹的过程。计算流星的轨迹需要多个站点分别测量流星的坐标,而流星的坐标来自于流星在视频画面中的位置,所以单站必须首先可以拍摄到流星的视频。所以,对流星的视频观测主要分成以下三个步骤:
- 拍摄到流星的视频
- 测量流星的视频坐标,并转换成天球坐标
- 用多站计算流星的三维轨迹
这个思路我们从已有的流星观测软件就可以看出:UFOCapture 套件就分成三部分,UFOCapture 负责流星监测,UFOAnalyzer 负责测量流星坐标,UFOOrbiter 负责对流星进行定轨。其他流星监测网的自有软件也基本符合这个思路。
拍摄流星的视频
流星的持续时间决定了需要用视频观测,而随机性决定了我们需要大视场长时间观测。一个很明显的道理:你拍到的流星数量,跟观测的时间成正比。所以为了拍摄到更多的流星,流星相机一般是长时间连续工作的,日落后就开始观测,日出前才停止。
与普通的天文观测不同,每个课题申请大型望远镜的观测时间常常以天或者小时计,而观测到的数据可能会处理几个月到一年,因此有大量的时间对图像进行精细的处理。而流星探测不一样,只要天气是好的,相机就会一直开着,一直会产生大量的数据。
因为流星观测拍的是“视频”,它产生的数据量也显著大于大型望远镜(可能 LSST 这样的巡天望远镜除外)。假设一个 1920×1080 的单色相机,每个像素 1 字节,每秒拍摄 30 帧画面,产生的数据量就是 1920×1080×1×30≈60MB/s,每分钟就是 3.6GB,每小时就是 216GB。如果是彩色相机,数据量还会变成 3 倍;如果是 16 位的相机,就再 2 倍;如果是 4k 的相机,就再乘以 4。积累起来会变成天文数字。
如此多的数据量就造成一个问题:我们常见的“先存下来再慢慢处理”模式就不合适了。一方面,每天存储如此大的数据量成本非常高;另一方面,相机每天工作 10 个小时,而这些数据必须得在 24 小时内处理完,否则第二天的数据就又堆积起来了。
更可恨的是,没有流星雨的夜晚,可能一整晚也就只有十几颗流星而已,这十几颗流星的视频加在一起可能也没有一分钟,正可谓沙()里淘金,投入产出完全不成正比。
以上种种,都指向一种方案:实时检测视频画面中有没有流星,如果有就存储下来,没有就直接把数据扔掉,不写入硬盘里了。那么实时检测流星来得及吗?检测出有流星的时候,是不是流星已经消失了?不用怕,我们可以在内存中缓存前面几秒的视频,当发现有流星的时候,自动从前面几帧开始保存,流星消失之后,再往后保存几帧,防止流星被拦腰截断。很多手机拍照也有时间回溯的功能,用的就是这个原理。
那么这样做,就意味着我们的软件可以实时处理几百 MB 每秒的数据流,一定要非常高效才行;同时准确性也要尽可能高,如果把流星漏过去了,数据就永远消失了。所以我一直认为,流星监测软件是流星视频观测中的核心技术。正因如此,UFOCapture 能在爱好者群体中经久不衰,拥有难以替代的位置。
测量流星的坐标
现在我们有了流星的视频,下一步就是测量流星的坐标了。一般来说,我可以指着拍到的视频说:“流星在这!”但这并不是计算机能听懂的方式,甚至也不是其他流星相机的运行者能听懂的方式。
流星定轨对流星坐标测量提出了要求:因为我们要综合多个站点的流星坐标,让它们的“射线”相交于同一点,所以所有观测站都要采用相同的坐标系。如果每个观测站采取的坐标系稍有不同,那相当于射线的方向有偏差,就无法相交到一起;并且,观测站的地理位置也一样重要,如果观测站的位置不对,相当于射线的端点有偏差,几条射线也没法相交到一起。
所以,我们最终输入的流星坐标,一定要采用国际公认的、天地统一的坐标系。这样的坐标系有没有呢?当然有,那就是国际天球参考架 ICRS。关于天体测量的内容非常复杂,不过简单来说,我们日常使用的赤经赤纬依赖这个参考架,而地面上的坐标,例如 wgs84 体系的经纬度,也可以换算到这个参考系里。
我们可以建立一个以地心为坐标原点,坐标轴不随地球自转的坐标系(也就是地心惯性坐标系 ECI),观测站的坐标就是射线的端点,流星的赤经赤纬就是射线的方向向量。这样所有观测站的观测结果就可以统一了。
思路是这么个思路,实际怎么操作呢?
第一步,我们测量流星在画面上的像素坐标。这一步比较简单,用现有的天文测光软件魔改一下就可以胜任,简单讲就是寻找流星的峰值,或者重心的位置。
第二步,把像素坐标转化成天球坐标。这两个坐标的对应关系主要受两个因素影响,第一是相机镜头的畸变,第二是相机的指向。
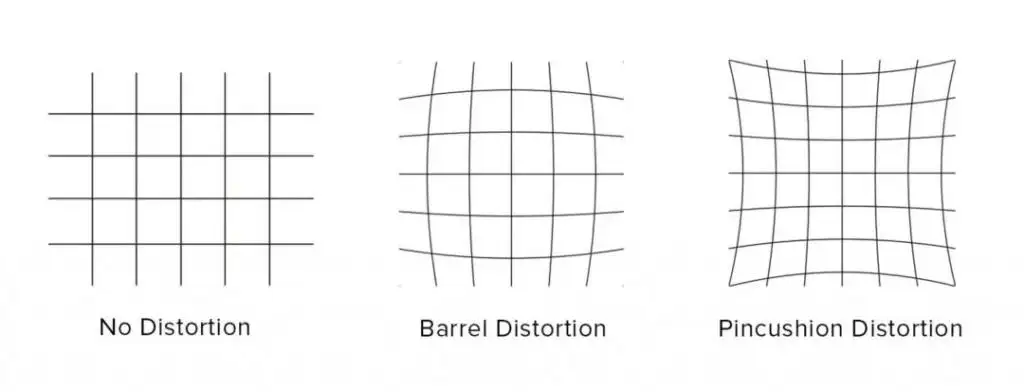
我们用最简单的近似(尤其对长焦的望远镜成立)来看,视场是 x°,有 y 个像素宽,那么流星与画面中心的距离是 z 像素的话,那它离画面中心就是 z(x/y)度。但对广角镜头来说,这个简单的关系并不完全成立。
一般来说,同一个物体在广角镜头的画面中心或边缘,它大小是不一样的,这就是所谓对的畸变。在画面的边缘,如果“底片比例尺”小于(x/y)的话,就是所谓的桶形畸变,如果大于,就是枕形畸变。
这些畸变的参数与镜头的光学设计有关,可能会包含在镜头的参数表里;但是也不能直接拿来用,因为实际的畸变还与镜头的安装方式有关:镜头的光轴稍微歪了一点,对焦距离不一样,这些参数就都会变。
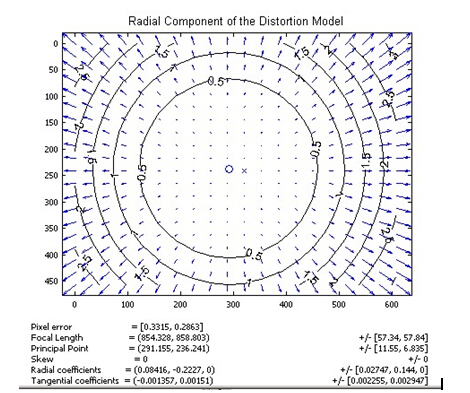
而对畸变参数的实际测量,就有几个不同的方式。在计算机视觉领域比较常见的方式是拍摄一个棋盘格的板子,有现成的算法可以寻找棋盘格上的各点,然后计算畸变参数。而在天文上,会采用画面中的恒星来计算像素坐标与天球坐标的关系,其中就涵盖了对畸变的拟合。
而相机的指向也有两个成分:其一是相机是怎么固定在地面上的(也就是相机的朝向),这个基本上是固定的;其二是地球自转到了什么地方,这个只与时间有关。这一步的计算比较简单,就是给坐标乘上几个旋转矩阵就好了。
总的来说,最朴素的方式就是把上面所说的畸变参数、相机指向都测量好,假设它是不随时间变化的(例如我有个鱼眼镜头,我非常精确地把它调整到画面中心正好是天顶),那么只要沿着这个流程计算就好了。不过实际上,相机的畸变和指向都会随时间有微小的变化:在不同季节,热胀冷缩会导致镜头的形状有些许变化;而一阵大风就有可能会把相机的指向吹歪一点。这些误差都会随时间累积。
所以,实际观测中我们都会用画面中恒星的位置来进行实时的校准,在恒星数量足够的时候,每颗流星都做一次。因为恒星的天球坐标是已知的,在同时知道恒星的图像坐标和天球坐标的时候,就可以计算上面说的所有参数了。这样得到的流星坐标是最准确的。
多站计算流星的三维轨迹
用两个观测站测量的流星坐标来计算流星的实际位置,本质上就是一个几何问题。求两条直线的交点。在实际操作中,由于观测误差,两条射线是不会严格相交的,而是会稍稍错开一点,此时对流星位置的最佳估计就是与各个射线距离(或距离的平方)之和最小的那个点。
而这么做还有一个隐藏假设:那就是两个站点的时间是精确同步的。我们说到对流星的视频观测时,其实不只是需要短曝光带来的高时间分辨率,还需要与之匹配的高时间精度。很遗憾,大多数爱好者器材并不能做到如此的时间精度。我认为,时间精度是在流星监测中长期被忽视的一个方面,而根据一些研究,时间的偏差会显著影响对流星定轨的精度。
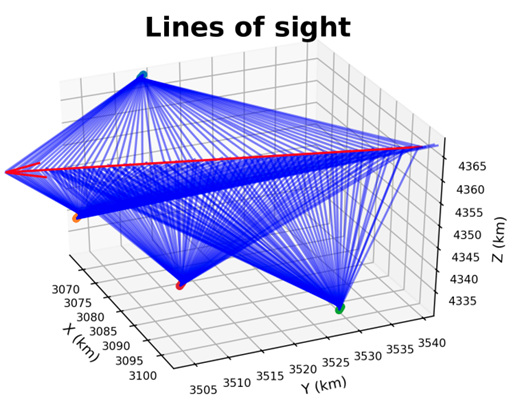
一条流星的轨迹包含很多个点,如果我们对每个点都进行三位定位,就可以得出一条折线,这是各种误差造成的。而如果我们假设流星轨迹大致是一条直线,流星在这条直线上逐渐减速,这样就可以对整条轨迹进行拟合,得出的轨迹的误差就比单独每个点的误差小,因此持续时间长、数据点多的流星,定轨精度就更高。而此时,流星轨迹模型的选择就非常重要:近几年有一些文章[1]指出,之前经常采用的一个模型并不非常合理。也有模型无关的定轨程序发布,在之后的文章中我们来详细解读。