Appearance
通通拉满!网络摄像头的错误设置
电影里偶尔会出现这样的桥段:街道上的摄像头拍到一张车辆的照片,这时候大佬对着小喽啰喊,放大!增强!然后小喽啰一通操作,画面越放越大,车牌号、驾驶员就都变得清清楚楚了。
我们都知道在现实中这种操作显然不存在,望远镜的分辨率和极限星等受口径限制。所以,在拍摄流星时,必然会撞到这些物理定律设置的障碍。
不过有意思的是,本来用于安保的网络摄像头很早就提供了“降噪”功能。只要打开降噪功能,晚上的画面立刻就变得清晰了许多,本来噪声密布的夜空瞬间安静了下来,很多本来看不到的星星也浮现了出来。这是怎么做到的?难道安保相机有一些不为人知的算法?为什么这样的技术没有应用在天文领域呢?不知道你有没有注意到这一点:虽然画面变“好看”了,拍到的流星好像并没有增多。实际上,“降噪”也并不是没有代价的。

本文就来讨论一下网络摄像头的一些错误设置,从原理出发,分析这些设置为什么管用、又为什么有害。
降噪
我们先来看两段流星视频样本。第一个样本开启了刚才说的“降噪”功能,第二个是 CMOS 相机输出的原始视频,没有经过处理。两段视频的观感非常不同。
很明显,第一段段视频里天空背景非常清晰平滑,而反观第二段视频,画面中全都是噪点,显得画质很低。但是,两段视频中流星的形态也完全不同,第一段视频里流星有长长的尾巴,运动过程是慢慢变亮慢慢变暗,像是水波纹一样;而第二段视频里的流星只有一个亮点,但运动轨迹显得干脆利落,没有尾巴,还可以看出剧烈的光变和爆裂。
上一篇文章里我们讲过,在恒星、流星这样的亮度范围,光子的泊松噪声非常明显,它受数学规律支配,与设备无关。既然如此,第一段视频里噪声是怎么去除的?其实道理非常简单,那就是取平均。
例如上篇文章中讲的数公交车的场景,如果只数 10 分钟,噪声就非常大,而如果数了 2 小时,噪声就比较小了。而如果我们数了 12 个 10 分钟,然后把结果取平均,其实相当于数了两个小时,所以平均到 10 分钟之内,噪声水平就比之前小了很多。顺带说一句,这就是深空摄影中“叠加降噪”的手法,多张照片叠加就相当于累积了曝光时间,所以可以得到很高的信噪比。
而我们的摄像头,也是采用这种“天文”方法来降噪。单帧的图像噪声太大不好看?那就把每一帧都跟之前 10 帧取平均值。受益的场景其实是夜间的安保:现在每一帧都相当于 10 帧的长曝光,如果画面中大部分是静止的景物,这样的叠加降噪可以大大提升清晰度,这样作为卖点会非常吸引顾客。而出现小偷毕竟只是小概率事件,大部分时候值班员盯着一个干净的监控画面会感到心情非常舒畅。
但是对移动的目标这样做问题就很大了。尤其是流星,速度飞快,你取平均跟谁取呢?只能与流星出现之前的 10 帧取平均,但是那些画面里又没有流星。那流星的信号实际上是被削弱了。另外,流星飞过后的地方,本来只有天空背景,但却被平均进了刚飞过的流星的亮度,也变得很亮,所以流星就有了长长的尾巴。
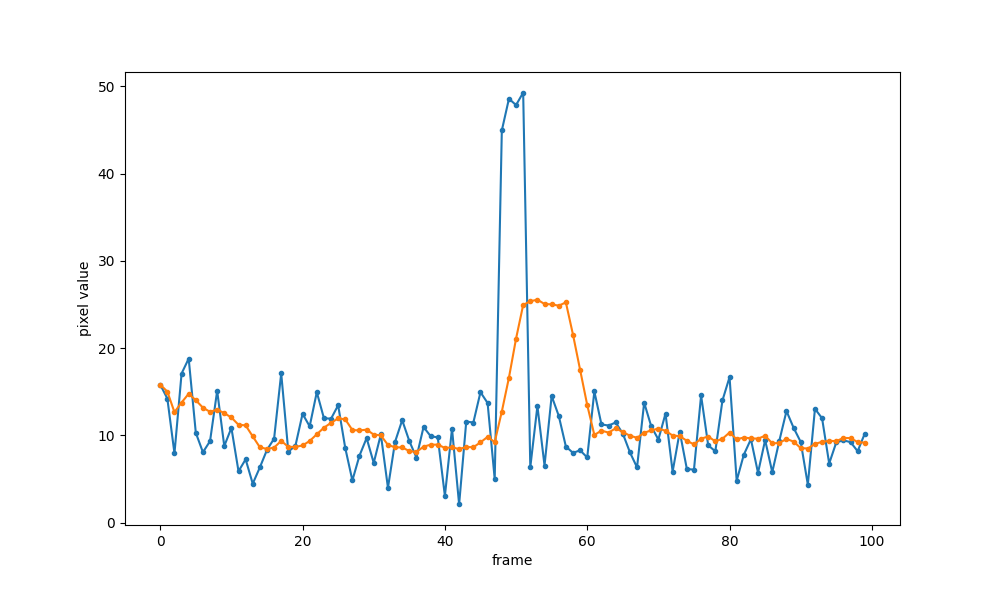
上图是一个假想的像素接收到的亮度曲线。原始数据是蓝线,流星经过这个像素的时间很短,只有 4 帧,体现为一个尖峰,而噪声比较大。如果我们把每个点都与之前 10 个点取平均,结果就是橙线。可以看到,噪声大大降低,但是流星的峰值变低了,持续时间却变长了。并且,流星出现的时间整体比实际更晚。
那么,开启了降噪设置进行流星监测有什么坏处呢?首先,这种设置并不能增加拍到的流星数。叠加降噪只对静止的天体管用,所以我们看到恒星的数量变多了;但是经过平均,流星的亮度降低了,也分散了。很多人都说降噪功能可以增加极限星等,对用来测极限星等的恒星来说不假,但是对流星的极限星等并没有增加。
其次,拍到的流星视频,科学价值大打折扣。最重要的流星位置测量不准确了。我们测量每一帧上流星的坐标用来定轨,而经过降噪后的画面,流星的亮度大多集中在流星过后那个虚假的尾巴上,那么测量出来的流星位置就比真实的位置落后一些。如果流星有减速和光变,那情况更复杂,造成的误差难以修正。另外,流星的光变曲线也相当于被抹平了,无法用来进行更深层次的研究。
增益
这些设置基本来自于另一个需求:增加流星的“显眼”程度,让比暗的流星也有比较好的视觉效果。主要有两点:通过“增益”设置增加摄像头的感光度,提升对暗弱光线的响应能力;以及亮度和对比度设置,压低天光背景,提亮流星的亮度。

这里的错误设置其实比较隐蔽,在天文的其他领域不常遇到,容我慢慢道来。上篇文章我们说到,增益就是光电子和 ADU 的比值,这个比值是可以设置的。如果设置的比较大,一个光电子对应的 ADU 就更多,画面就更亮。一般天文观测中,常常把 CCD 设置成一个电子对应一个 ADU,或者多个电子对应一个 ADU。但是对于流星观测,曝光时间非常短,所以电子数很少(可能只有几个十几个),所以我们不由自主得把增益设置得非常高,这时候,一个电子就会对应好几个 ADU。
这样做有什么问题呢?分析两种情况。不考虑其他噪声,假设我们相机的 ADC 是 8 位的,它可以输出的值为 0-255。第一种设置,增益为较低的 1e/ADU(这个单位与相机控制页面的设置是相反的),那么他能拍到的最暗的亮度就是 1ADU,对应 1 个电子,最亮就是 255ADU,255 个电子,相差 255 倍。第二种设置,增益设置为 0.2e/ADU,那么最暗就成了 5ADU,1 个电子,最亮还是 255ADU,只对应 51 个电子,最亮和最暗只差 51 倍。电子数多于 51,ADU 值也无法继续增加了。这个最亮最暗相差多少倍,就是摄影中常说的“动态范围”,高感降低了动态范围。
这样暗的目标确实显得更亮了,但是相机对亮暗的分辨能力却降低了。第一种设置下的 52-255 个电子,在第二种设置下全部过曝,ADU 值定格在了 255。所以对于亮的目标,我们就无法知道它的亮度了,因为 52 电子和 255 电子一样亮。这就造成,我们的摄像头虽然极限星等很高,比如 5 等,但是画面中 2 等的恒星就开始过曝了。如果有亮流星出现,画面可能会有一大片白,对流星的坐标测量也会出问题。
这种设置的可惜之处在于,我们对画面造成了不可逆的伤害。如果有 1e/ADU,1-255 取值范围的数据,我们在后期想把它变亮 5 倍,让它与 0.2e/ADU 的画面一样亮,这是可以做到的——在程序里并没有最大值 255 的限制,想乘几都可以。但是 0.2e/ADU 的数据,因为相机内部有 255 的限制,那些 52 电子以上的数据就永远失去了,我们后期不管怎么做,都没法把这些信息还原出来,因为得到的画面中它们是完全一样亮的。所以,如果想要更好看的视频,完全可以把视频导入到软件中编辑,而不是一开始就把增益设置得特别高。
亮度、对比度
在图像处理领域,亮度、对比度的调整其实是对图像的值进行线性变换,其实就是对亮度的缩放、平移操作。

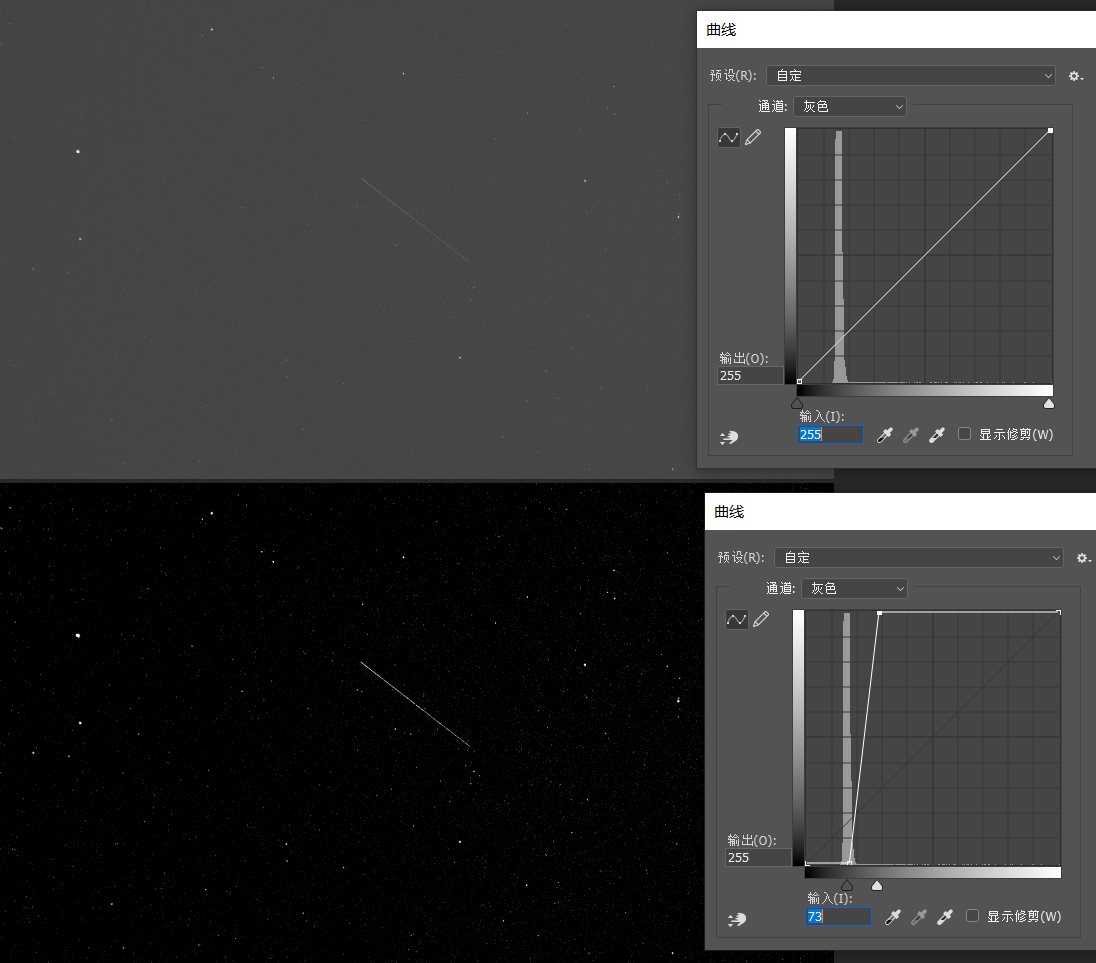
亮度、对比度的设置与增益也类似。有的人为了画面“干净”“清晰”,把对比度拉到非常高,画面就变成了一种诡异的情况:天光背景几乎被压到 0,所以也没有什么可见的噪声;然后比天光亮一点点的东西全都变成了 255,恒星、流星,出现就是巅峰。这种类似二值图的视频完全没有亮度信息可言。下图是用 photoshop 进行的演示。
这也带来了另一个重要的错误:天光背景变成了负值。与超过 255 的值类似,比 0 还暗的值只能输出为 0。如果为了压低天光和噪声把天光设置到 0 以下,就会遇到另一个问题。
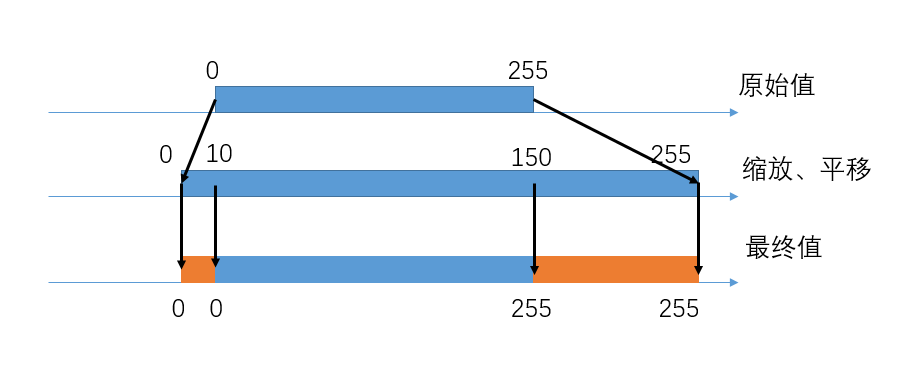
在对天体做测光的时候,都是把它的亮度与周围的天光相减。天光的亮度是测光中很重要的数据。比如测到一颗星 A 的亮度是 50,而它周围天光的亮度是 20,这样我们就知道属于这颗星的亮度是 30。如果另一颗星 B 测到是 80,那么它的亮度就是 60,B 星的亮度是 A 星的两倍。之所以能得到这个结论,是因为常见的 CMOS 和 CCD 是线性器件:在工作范围内,接受到的光子数与输出的 ADU 值成正比,ADU 两倍就是光子数两倍。
但如果我们调整了亮度和对比度,把整个画面压低了 30,这时候画面中的天光就都变成负值了,所以输出值是 0;而 A 星变成了 20,B 星变成了 50。可以看到,两颗星的比值不再是两倍了。也就是说,天光背景没了,线性就被破坏了。
所以不要把天光背景压到小于 0,等于 0 也不行。如果天光背景是 0,那由于读出噪声的存在,很多像素值随机波动时还是会小于 0 而被截断成 0,所以测得的天光平均值会有偏离。这就是为什么天文摄影中有个设置叫做“偏置”,通常设置成大于 0,就是为了避免读出噪声被 0 截断。天文摄影中的叠加就是依赖器件的线性,所以偏置和偏置场的拍摄非常受重视。
总结
作为天文爱好者,我们进行流星观测,自然需要拍摄天空的真实写照。那些“降噪”功能,为了观感改变了流星的形态,就像是过度美颜的证件照,失去了追寻自然本真的初心。
整篇文章下来,可以总结成一个规律:对图像的大部分处理功能都是不可逆的,这些设置越少用越好。如果为了省事,把相机的输出设置成适合肉眼观看的样子,实际可能会让图像失去科学价值。
这里我并没有反对这些处理,只是反对把这些处理放在相机内部。我们完全可以让相机输出原始数据,在进行了测量定轨、保存了原始数据之后,再对数据进行处理,制作成美观的流星视频。在这方面天文 CMOS 相机有先天的优势,因为它们通过 USB 输出的是无压缩的原始数据,尤其是有的还支持 16 位原始数据,为后期带来了很大的空间。而网络摄像头输出的是码率有限的 h.264 视频流,暴力处理后画质会有所恶化。